一种同轴双力臂传动的六自由度串联式力反馈设备
2025年6月20日
数园网络
2106
申请号:CN202410649790.X
申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州)
专利权人:华南理工大学 | 人工智能与数字经济广东省实验室(广州)
申请日:2024-05-23
授权日:2025-09-19
专利类型:发明
法律状态:授权
发明人:李静蓉|胡丁群|王清辉|池梓鹏|方道鑫
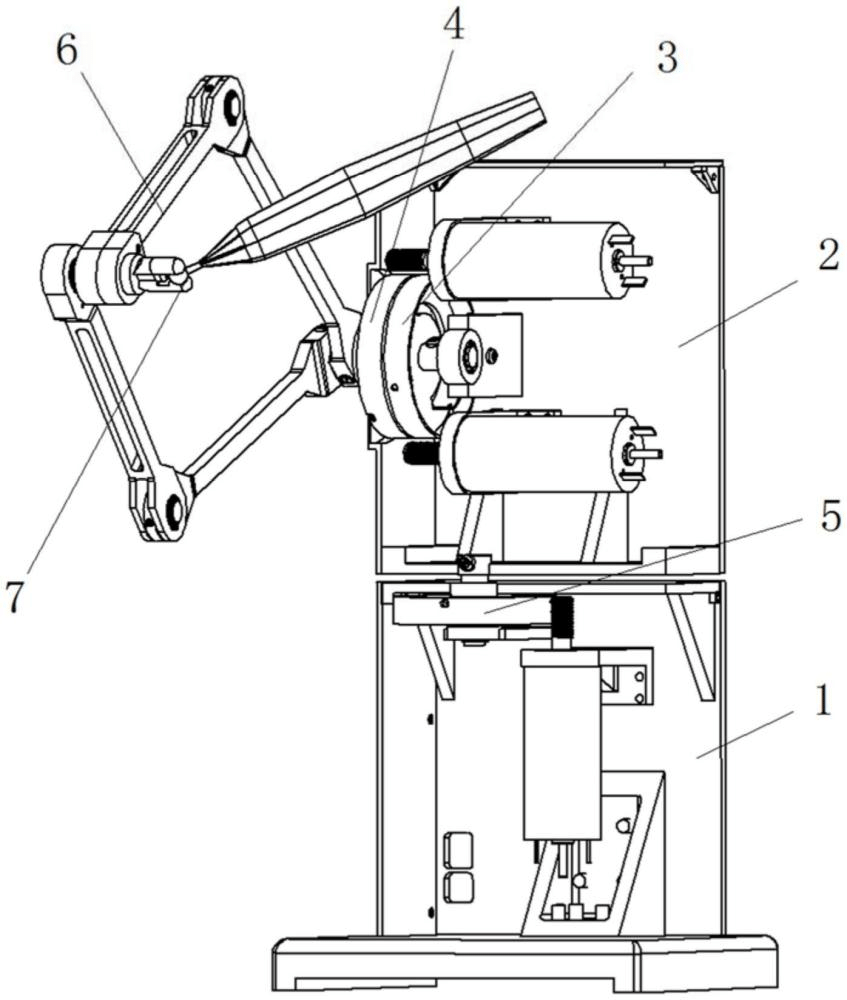
摘要:本发明涉及一种同轴双力臂传动的六自由度串联式力反馈设备,包括固定底座、转动平台、第一丝传动机构、第二丝传动机构、第三丝传动机构、四边形连杆机构、球铰末端机构;四边形连杆机构包括依次转动式连接的第一驱动杆、第一被动杆、第二被动杆、第二驱动杆;球铰末端机构包括末端连接装置和内设陀螺仪传感器的末端操作手柄,末端连接装置安装在四边形连杆机构远离驱动端的一端;第三丝传动机构驱动转动平台在水平面上转动,第一丝传动机构驱动第一驱动杆摆动,第二丝传动机构驱动第二驱动杆摆动;三个丝传动机构均包括电机,电机末端有编码器。本发明增加力反馈设备的运动自由度,提高力反馈设备的灵活性和稳定性,属于力反馈技术领域。
摘要附图:
许可范围:全国
合作方式:先用后付
开放许可期限:以协商为准
联系人:司老师
联系电话:020-88322793
邮箱:ip@pazhoulab.cn