基于V2G的能量调度方法、装置、设备、存储介质及产品
2025年6月20日
数园网络
1669
申请号:CN202510106689.4
申请人:华南理工大学 | 人工智能与数字经济广东省实验室广州
专利权人:华南理工大学 | 人工智能与数字经济广东省实验室广州
申请日:2025-01-23
授权日:2025-06-13
专利类型:发明
法律状态:授权
发明人:林镇宏 | 黄炽坤 | 许超旭 | 郑旻翚 | 东淏博
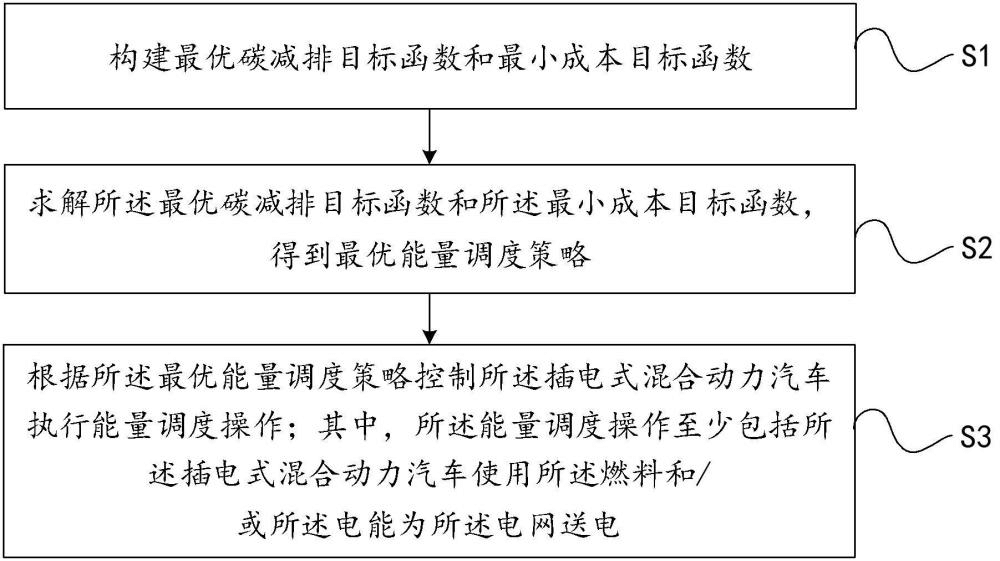
摘要:本发明公开一种基于V2G的能量调度方法、装置、设备、存储介质及产品,在V2G能量调度场景下,通过考虑插电式混合动力汽车在回程过程中所消耗的燃料的碳排放量、回程过程中所消耗的电能的碳排放量、插电式混合动力汽车与电网进行能量调度时所消耗的燃料的碳排放量以及将电能送回电网所产生的碳排放量、回程过程中所消耗的所述燃料的成本以及插电式混合动力汽车与电网进行电能交换时所消耗的成本等因素,来构建最优碳减排目标函数和最小成本目标函数;通过对多目标函数进行求解,来得到最优能量调度策略,以用于控制插电式混合动力汽车基于燃料和/或电能执行能量调度操作,有效地降低了V2G模式下能量调度的碳排放量,有利于环境保护。
摘要附图:
许可范围:全国
合作方式:先用后付
开放许可期限:以协商为准
联系人:司老师
联系电话:020-88322793
邮箱:ip@pazhoulab.cn