一种应对复杂路况的车道线检测及后处理综合技术
2025年6月20日
数园网络
2758
所属领域:
智能制造
成果简介:
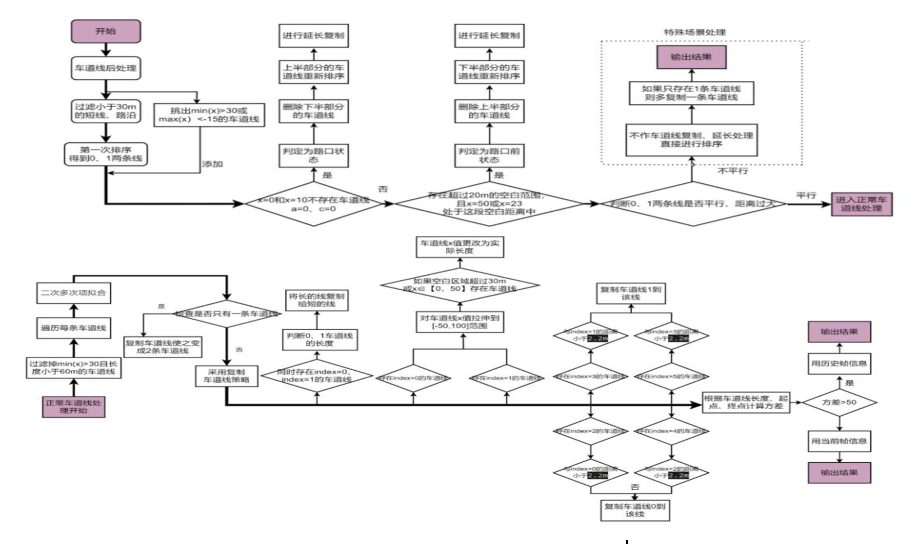
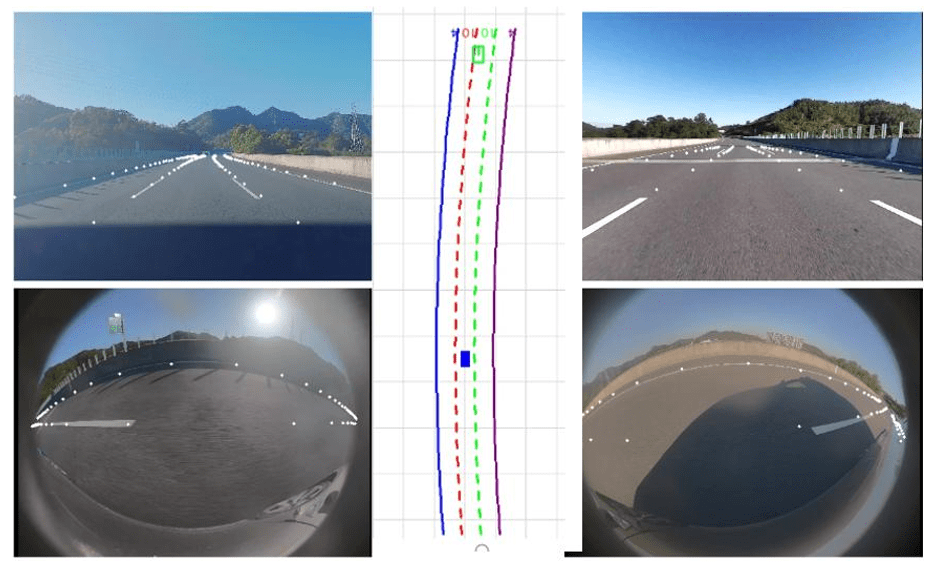
本成果聚焦自动驾驶和智能辅助驾驶领域,针对现有车道线检测技术在复杂路况下的不足,开发了创新的车道线检测与后处理技术:①车道线点提取与分类:基于BevlaneDet模型,运用多场景样本训练,结合卷积层和池化层进行特征提取,生成多尺度特征图,并通过全连接层转换为车道线点置信度值,设定阈值筛选,利用邻接矩阵或图算法分析连接性进行分类,实现精准提取和分类车道线点。②车道线聚类优化:对车道线的embedding信息进行归一化预处理后,进行k-means聚类,依据聚类中心划分车道线点;之后在y轴方向按offset做平均,最后根据残差端点的余弦相似度连接车道线,增强连贯性和平滑性。③车道线跟踪强化:采用mean-shift点滑动平均方法,构建滑动窗口计算平均位置更新车道线点;存储历史信息,将新、旧车道线点匹配和更新,结合历史趋势预测和修正车道线走向,提高稳定性和鲁棒性。④后处理模块完善:根据车道线跟踪结果判断场景,进行多维度优化,包括计算置信度、排序、过滤短线和断路,针对路口等特殊场景进行相应处理,对正常车道线进行遍历操作和三段拟合,提升整体质量和适用性。
一种应对复杂路况的车道线检测及后处理综合技术应用于德赛西威自动驾驶和智能辅助驾驶系统,帮助车辆在复杂路况下更准确地识别车道线,确保安全行驶。同时,可应用于智能交通管理系统,为交通规划和路况监测提供精准数据支持。
合作方式:
专利许可
联系方式:
成果转化部,020-88322793,tto@pazhoulab.cn