专利开放许可专区
-
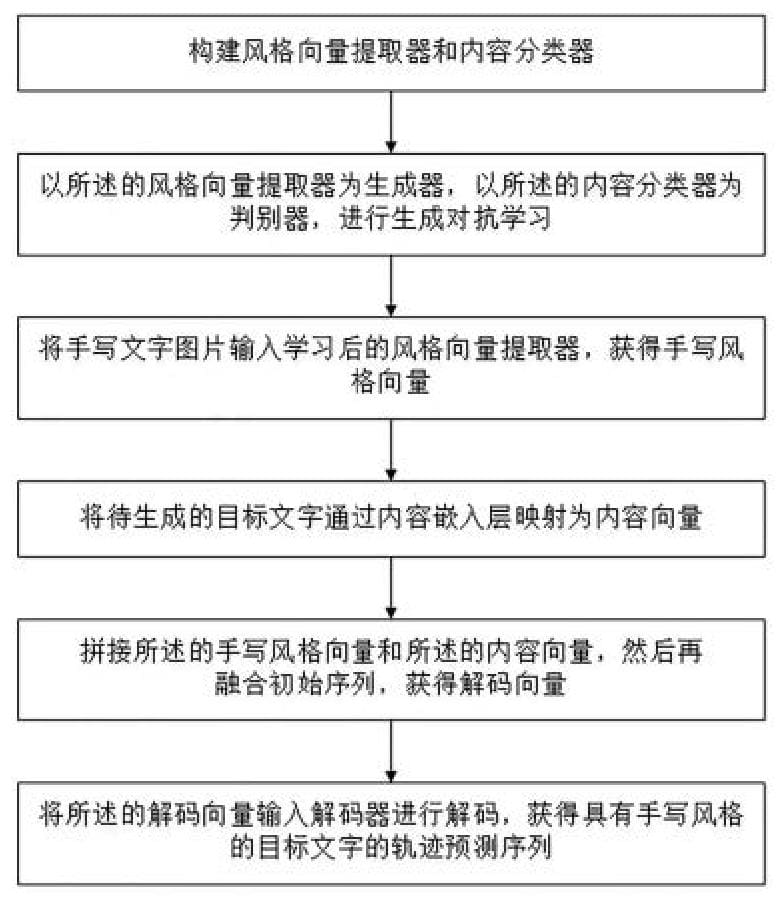 基于对抗解耦的个性化手写文字生成方法
基于对抗解耦的个性化手写文字生成方法申请号:CN202210392274.4 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
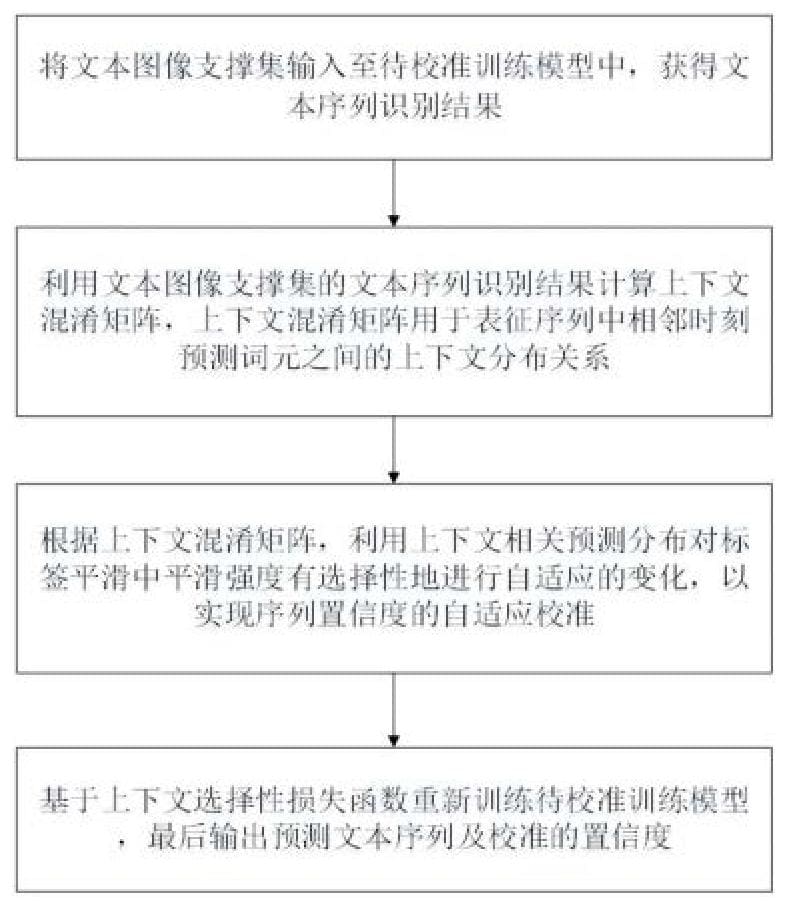 基于CTC解码器的文本序列识别模型校准方法
基于CTC解码器的文本序列识别模型校准方法申请号:CN202210402975.1 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
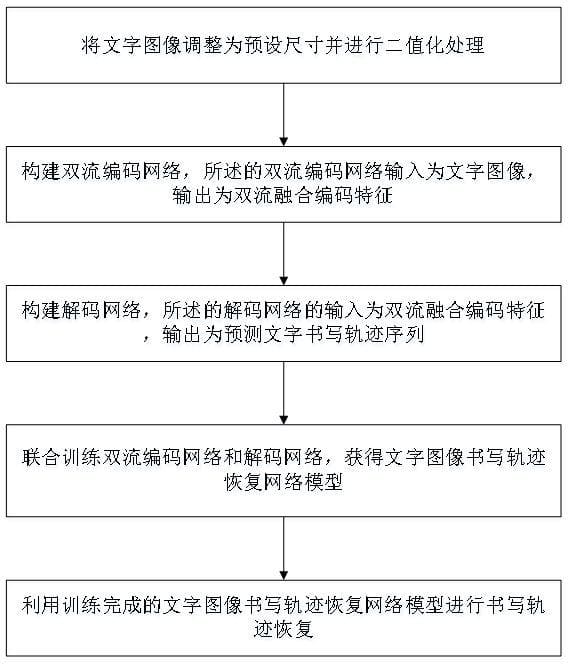 一种基于双流编码的文字图像书写轨迹恢复方法
一种基于双流编码的文字图像书写轨迹恢复方法申请号:CN202210363354.7 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
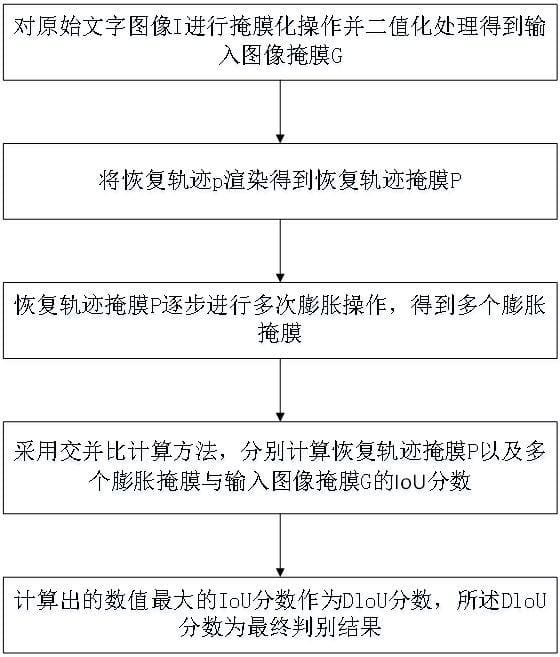 一种文字图像书写轨迹恢复效果判别方法
一种文字图像书写轨迹恢复效果判别方法申请号:CN202210417388.X 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
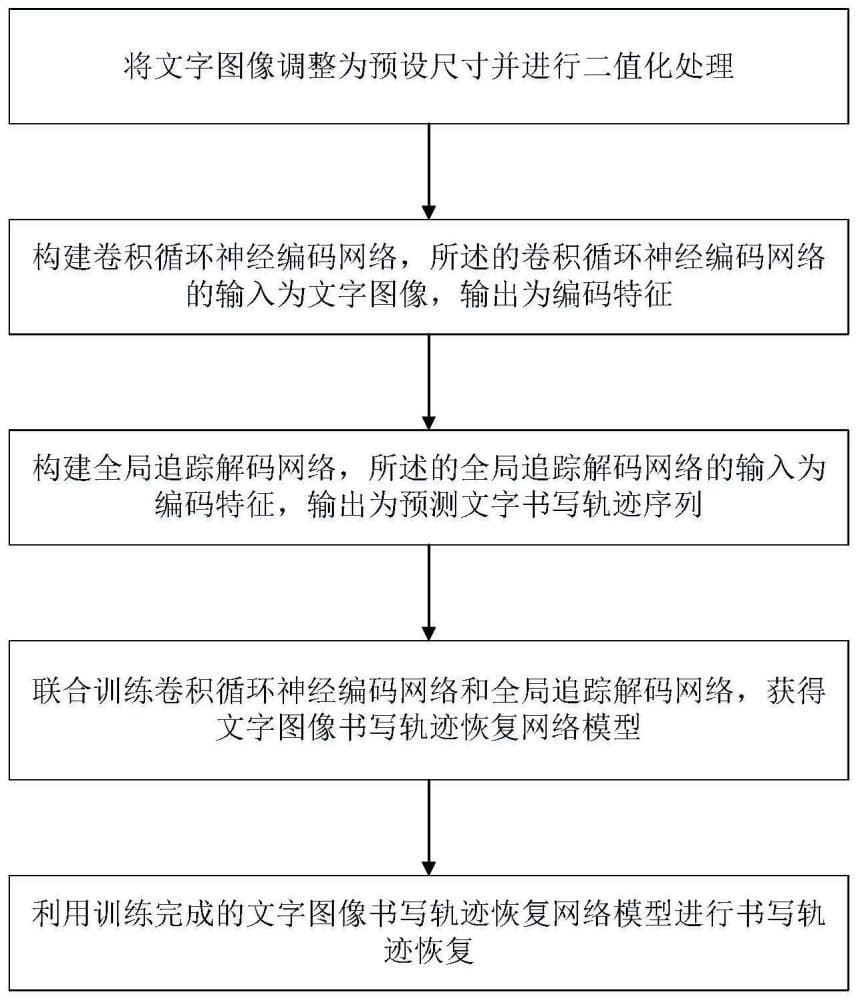 基于全局追踪解码的文字图像书写轨迹恢复方法
基于全局追踪解码的文字图像书写轨迹恢复方法申请号:CN202210363417.9 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
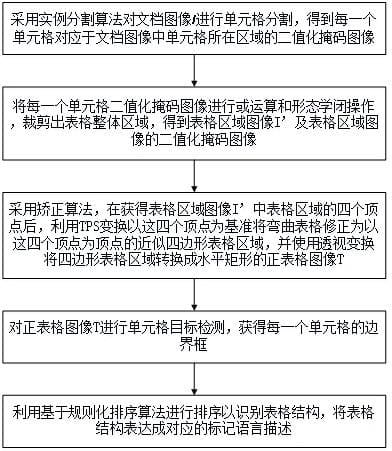 一种全线表表格结构识别方法
一种全线表表格结构识别方法申请号:CN202210425844.5 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
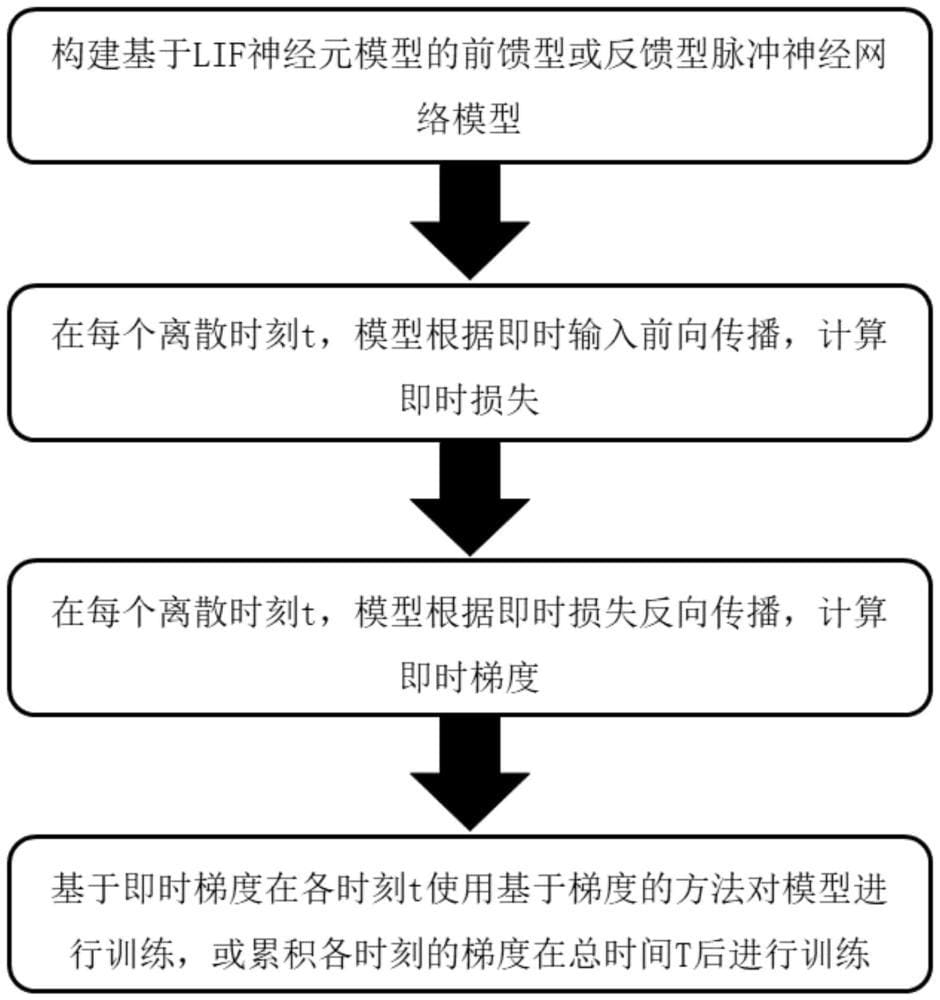
 一种基于脑神经模型的音频特征提取方法
一种基于脑神经模型的音频特征提取方法申请号:CN202510912582.9 申请人:华南理工大学|人工智能与数字经济广东省实验室(广州) 专利权 […]
2025.06.20 -
 一种从自然语言描述文本中重建出三维人体的三维重建方法及装置
一种从自然语言描述文本中重建出三维人体的三维重建方法及装置申请号:CN202411770211.3 申请人:人工智能与数字经济广东省实验室(广州) 专利权人:人工智能与 […]
2025.06.20 -
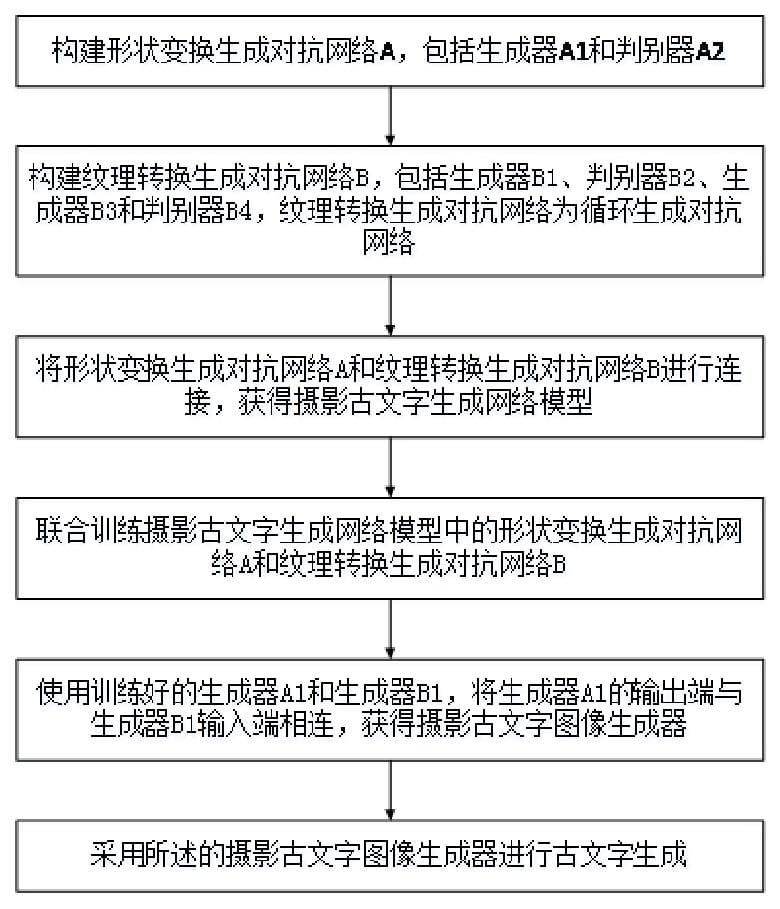 一种联合形状变换和纹理转换的古文字生成方法
一种联合形状变换和纹理转换的古文字生成方法申请号:CN202210336338.9 申请人:华南理工大学 | 人工智能与数字经济广东省实验室(广州) 专 […]
2025.06.20 -
 一种同轴双力臂传动的六自由度串联式力反馈设备
一种同轴双力臂传动的六自由度串联式力反馈设备申请号:CN202410649790.X 申请人:华南理工大学 | 人工智能与数字经济广东省实验室( […]
2025.06.20