打破次元壁!它让虚拟世界 “摸得着”
大家好呀,我是琶科小博士,国家对AI场景开放与要素保障力度空前,面对制造业转型的迫切需求与现代AI技术带来的全新可能,大家是否好奇,AI技术与制造业能碰撞出什么火花呢?
科技日报采访了琶洲实验室研究员王清辉教授,王教授利用人工智能(AI)解决了“传统铣削加工(制造业中一项至关重要且应用广泛的金属切削加工方法)轨迹在复杂加工区域中容易产生切削力突变,导致加工效率下降,加工精度损失,刀具寿命降低”的问题,把AI应用到复杂型腔模具及复杂自由曲面的粗、精加工中,通过智能化配置高速旋风铣与传统加工轨迹,可有效稳定加工过程的刀具负载,将加工效率提升30%以上。
这就是“AI+制造”的鲜活应用场景。随着AI加速渗透经济社会发展“毛细血管”,“AI+制造”正释放出更强动能。
“实际上,相比民生领域,AI在制造业领域的应用更加复杂,挑战也更大。”王教授说。
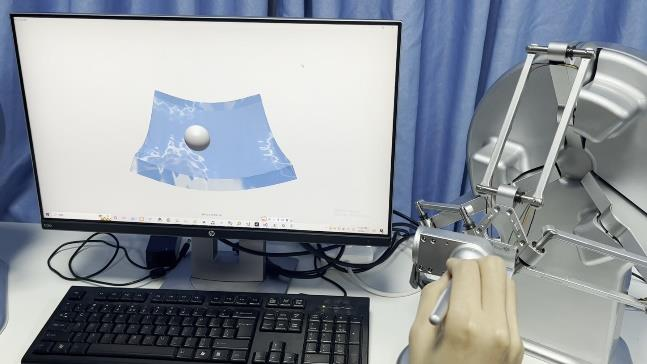
那么由王教授牵头带领的实验室团队是如何应对这些挑战的呢?接下来,让我们看看团队在智能制造领域的成果,琶科小博士将为你介绍一台神奇机器——力触觉反馈交互装置,让我们一边了解这台神奇机器,一边寻找这个问题的答案。
你戴上VR眼镜,置身于虚拟的游戏世界,能看到炫酷的场景、听到逼真的音效,可在触摸虚拟道具时,却只能感受到空气的虚无——这正是早期VR技术的遗憾。
而如今,力触觉反馈交互装置的出现,让“触摸”虚拟世界成为可能。
点击视频查看装置运作详情
核心原理:从自由度出发的运行逻辑
想要理解力触觉反馈装置的工作原理,自由度是最核心的切入点——它直接决定了设备能否模拟人手的自然动作,以及能否精准把力反馈于人。简单来说,自由度就是设备在空间中可活动的维度,在我们生活的三维世界里,一共有六个自由度。
我们用例子来说明:用水杯喝水时,我们需要把水杯先移动到嘴边——这个过程就是平移;随后转动手腕将水倒入口中——这个过程就是旋转。平移与旋转的三个方向变化(前后、左右、上下),共同构成空间中的六个自由度。

基于以上介绍,我们就能很好的理解力触觉反馈装置的原理了:首先,通过内置的高精度传感器,实时追踪操作手柄在六个自由度上的运动,并将位置、姿态、力与运动数据上传;接着,结合虚拟的物理模型,计算每个自由度上需要反馈的力,并将指令发出;最后,接收到信号的操作手柄会将力传回人手中,让人感受到虚拟力觉。
例如,我们通过力触觉交互设备在虚拟世界中拧一个阀门,随着阀门的拧紧,我们在手上感受到的阻力就会越来越大。如果我们在输出终端加上一个机械手,通过上述操作也可以在现实世界中远程控制一个阀门的开关。
技术难点:力触觉装置落地的闯关路程
知道了力触觉反馈装置的核心原理后,我们不难发现,要将这一原理转化为实际可用的设备,还需攻克诸多技术难关。首要的就是以下几个难题:设备灵活性的高要求、快速精确的定位、反馈装置的响应速度,以及影响最大的——重力补偿。

实验室团队在国家重点研发计划支持下自主研发的IntelliHaptic六自由度力反馈器,凭借高灵敏度位姿捕捉、创新动态补偿算法、高刷新率力觉输出、力触觉交互算法等核心技术,构建了“感知-决策-执行”的完整智能交互闭环,为具身智能时代的人机协同树立了新标杆。
在具身智能浪潮奔涌的今天,国产高端力反馈技术正实现从“跟随”到“引领”的历史性跨越。作为国产高端力反馈技术的领军者,IntelliHaptic致力于构建开放共赢的产业生态。团队提供完整的API接口与Unity快速开发插件,支持多行业深度定制与联合开发。从工业遥操作到医疗培训,从虚拟仿真到装备控制,IntelliHaptic正成为连接虚拟与现实、人类与机器的重要桥梁。
接下来,琶科小博士将一一给大家介绍团队在研究中遇到的问题,以及他们的解决方案。
一、攻克灵活性与重力补偿难题
在现实世界中,运动是很复杂的,往往会在六个维度上同时变化。为了用户在操作过程中能精准、流畅地与虚拟环境交互,力触觉反馈装置的输出终端必须在六个自由度上都能施加大小不一的力及运动。另外,由于重力的存在,力触觉交互设备在使用中也会始终受到一个额外的“向下”作用的力。对于平动,重力的作用比较好抵消;但是在转动分量上,加上重力的影响后,对设备的控制能力就提出了很高的要求。
以天文望远镜为例,由于需要跟踪定位天体,工作中的天文望远镜需要不断调整指向。望远镜的镜片十分沉重,因此,即使是细微的转向,也需要大量控制器协同运动,并稳稳地承载住镜片,以防止镜片边缘在重力作用下发生形变,影响成像质量与解算出的数据。
团队利用独特的混联式架构,这种创新的设计兼顾了串联与并联机构的优点,不仅极大提升了设备灵活性,还显著增强了设备的承载能力与稳定性,同时也为重力补偿技术打好了基础。为了避免用户操作时感受到重力影响下“不真实”的力,实验室团队通过深入研究与反复实验,巧妙运用主被动技术相结合的方式,成功实现空间位置的完全重力补偿。这意味着无论用户如何移动操作手柄,都仅仅会感受到与虚拟世界交互产生的力反馈,从而极大提升虚拟世界的真实性与沉浸感。
二、实现快速响应与精确力反馈
在玩游戏时,我们总会希望有最好的设备硬件,不然性能不足导致的画面卡顿、延迟,就会大大影响游玩体验。同样的,在使用力触觉交互设备时,数据处理与分析、信号解算与上下行、设备本身的响应速度带来的延迟,都会影响使用体验,造成“不真实感”。高精度的定位与力触觉反馈同样重要。
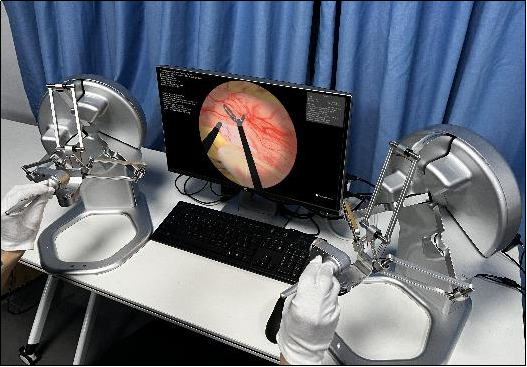
例如在一个虚拟的手术场景中,只有精确定位到医生手的位置,并对手术器械的运动给出精准的反馈,才能提高模拟手术的真实性与训练效果。
为了解决上述问题,实验室团队研制的Intellihaptic力反馈器,拥有6个高精度编码器,辅以位置解算算法,精准获取用户手部的空间位置与姿态信息;同时,通过配备高性能电机与驱动控制系统,设备可以快速准确地根据用户的操作产生相应的力反馈。在设备中配置的高精度、高刷新率的力反馈器,提供3自由度的高分辨率与高频变化的力觉输出,位移精度达到10微米量级(大概为头发丝直径的1/10),而刷新率更是高达4kHz(也就是一秒钟四千次)!低延迟、高精度的力触觉反馈,为用户带来流畅的交互体验,让用户真切地感受虚拟世界中物体的动态。
三、从实验室到应用的商业化跨越
在技术问题之外,把技术产业化、商业化同样是一道隐形的鸿沟。就像科学家培育出了优质的种子,还需应对土壤改良、气候适应、市场渠道搭建等一系列挑战——技术是核心,但要让技术真正走进生活、创造价值,还需要跨越从实验室到生产线、从技术参数到用户需求的多重关卡。
目前力反馈设备已经与华沿机器人(大族机器人,国内协作机器人第一品牌)实现深度融合,打通了双向数据通道,构建了高效精准的“人在回路”遥操作系统。并与成都海科工控合作,成功实现与史陶比尔(Staubli)工业机器人的系统联动,在防爆、高危等极端工业场景中,操作者能够通过力反馈设备“亲身”感知远端环境,不仅重新定义了人机交互新范式,而且为工业安全运营提供了革命性的技术保障。
应用场景:力触觉装置的用武之地
力触觉反馈装置展现出了极大的应用价值与发展前景,那么它究竟可以运用到哪些方面呢?
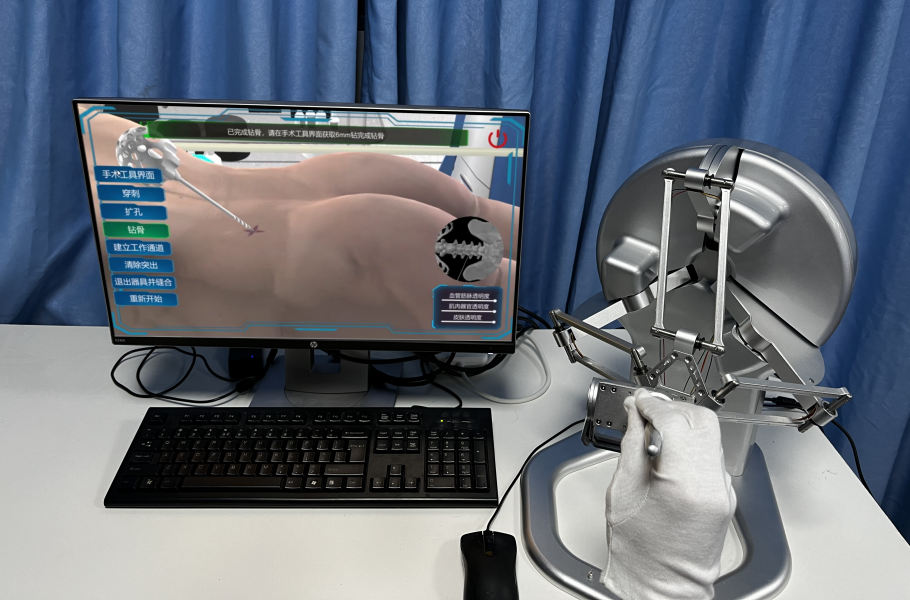
在医疗领域,集成IntelliHaptic力反馈的智能培训系统正深度赋能临床教学。团队与顶尖医学机构深度合作,与中山大学中山医学院联合开发的“临床技能虚拟培训系统”作为模拟医学重要成果参加中国医院协会模拟医学专业委员会年会,受到了全国重点医院的关注。与中山大学孙逸仙纪念医院合作研制的骨科微创手术模型训练系统可以让操作者感受到精细力觉变化。该平台打破了传统教学的时空限制,创新地引入了力反馈设备进行交互,丰富了教学形式,推动了临床教学从传统模式向沉浸式、标准化、可量化的智能培训新时代迈进。
在工业制造领域,力触觉反馈设备可以实现远程精密操控,从而更加安全、精准地完成任务,实验室团队的产品也已经在中国散裂中子源的遥控操作维护中获得应用。
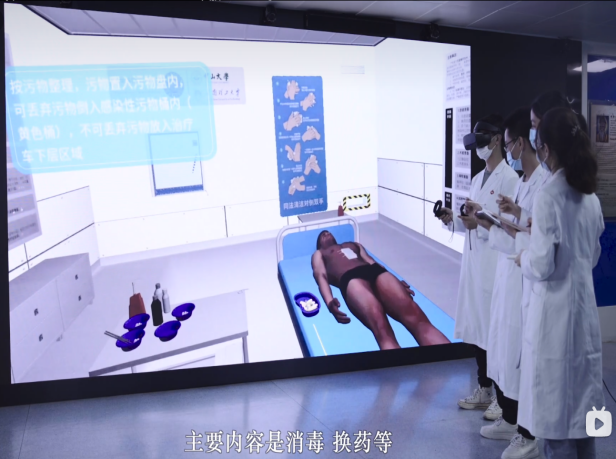
在教育领域,通过虚拟远程实验平台,学生可以在虚拟环境中完成各种实验操作,无需学校配备大量仪器、场地,不但可以让学生更身临其境地体验科学原理,还能为学校节省大量成本……
随着技术的不断迭代,力触觉反馈装置不仅将在医疗、工业、教育等领域发挥更大作用,还可以走进日常生活,如让我们在网购时“触摸”到商品的质感、在远程社交时感受到对方的握手力度……它像一座连接虚拟与现实的桥梁,把真实的触感带进了虚拟世界。国产力触觉技术的突破,不仅填补了行业空白,更让我们对虚拟与现实融合的未来充满期待:我们与虚拟世界的交互即将告别“隔空对话”,变得愈发真实可触。
今天的科普就到这里,我们下期再见!
团队介绍
CAM和VR研发团队由琶洲实验室研究员、华南理工大学二级教授王清辉领衔。其团队人员涵盖机械工程、电子信息、计算机科学等专业领域,形成了学科结构合理的科研梯队。重点突破了非标零件全自动轨迹规划、高精度机构设计、机器人实时控制算法、多模态交互等关键技术难题,为AI+制造提供了新的解决方案。