一种冗余度双机械臂相互避障方法、装置及存储介质
2025年6月20日
数园网络
194
申请号:CN202310346250.X
申请人:人工智能与数字经济广东省实验室(广州) | 华南理工大学
专利权人:人工智能与数字经济广东省实验室(广州) | 华南理工大学
申请日:2023-03-31
授权日:2025-05-06
专利类型:发明
法律状态:授权
发明人:张智军 | 张铭洋 | 罗亚梅 | 陈凯全
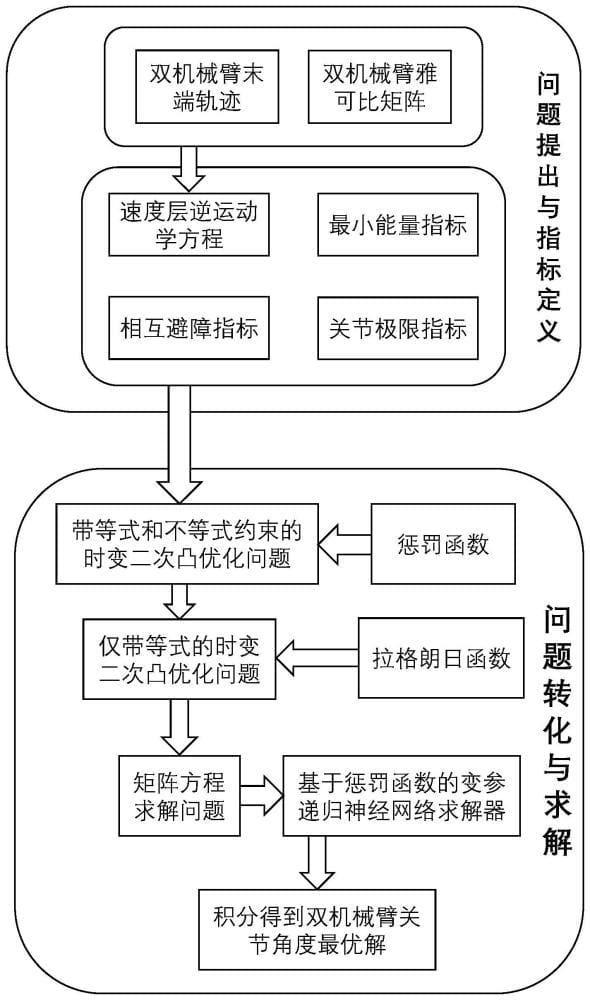
摘要:本发明公开了一种冗余度双机械臂相互避障方法、装置及存储介质,该方法包括通过冗余度双机械臂各自的末端轨迹,在速度层上建立机械臂逆运动学方程并增加最小能量、关节极限和相互避障指标;将逆运动学方程和各项指标转化为受等式和不等式约束的时变二次凸优化问题;通过定义惩罚函数将上述问题转化为仅受等式约束的时变二次凸优化问题;再通过拉格朗日方程将其转化为时变矩阵方程;将矩阵方程通过变参收敛微分神经网络进行求解;最后将求得的在速度层上的最优解进行积分,得到关节角度的最优解。本发明能够让双机械臂能够顺利完成规划好的运动任务,有效案解决冗余度双机械臂相互避障问题,具有计算效率高、实时性强,鲁棒性好,精度高的优点。
摘要附图: