一种分布式多冗余机械臂目标追踪方法、装置及存储介质
2025年5月28日
数园网络
426
申请号:CN202410341311.8
当前申请(专利权)人:人工智能与数字经济广东省实验室(广州)
申请日:2024-03-25
授权日:2025-04-18
专利类型:授权发明
法律状态/事件:授权
发明人:张银炎 | 刘可欣
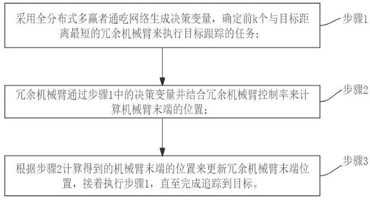
摘要:本发明公开了一种分布式多冗余机械臂目标追踪方法、装置及存储介质,该方法包括步骤1:采用全分布式多赢者通吃网络生成决策变量,确定前k个与目标距离最短的冗余机械臂来执行目标跟踪的任务;k为正整数;步骤2:冗余机械臂通过步骤1中的决策变量并结合冗余机械臂控制率来计算机械臂末端的位置;步骤3:根据步骤2计算得到的机械臂末端的位置来更新冗余机械臂末端位置,接着执行步骤1,直至完成追踪到目标。本发明方法不仅简化了控制流程,提高了系统的鲁棒性和可扩展性,而且降低了维护成本,并提升了整体效率,其优秀的性能和广泛的应用潜力使其具有良好的产业化前景。
摘要附图: